Robot Tour!
Now that we’ve unearthed the competition season, and have one win under our belt, we have some improvements to make on our robot before the next competition! Read this issue to learn about the robot!

Isabel S.

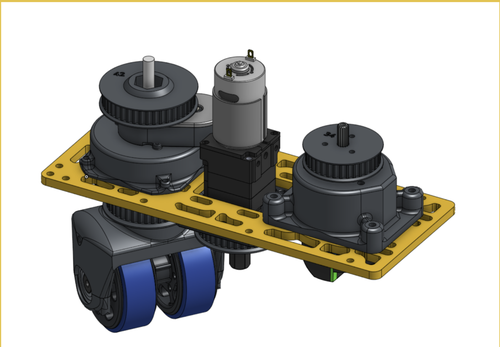
Swerve Drive
Stryke Force’s signature ‘3rd Coast’ swerve drive is on its 9th generation this year. We decided to move to individual swerve modules for ease of maintenance, and we are continuing this design philosophy. The individually hung modules, combined with a lightweight chromoly 4130 steel frame allows our robot to flex in a way that acts as an integrated suspension system. A minor change that was made was that we switched the internal bushing that the swerve azimuths on to Delrin plastic in order to require less maintenance than the original printed bushing. Additionally, this year we have switched to the CTRE Minion over the azimuth 550 because of availability, but the overall design of the swerve remains mainly unchanged.
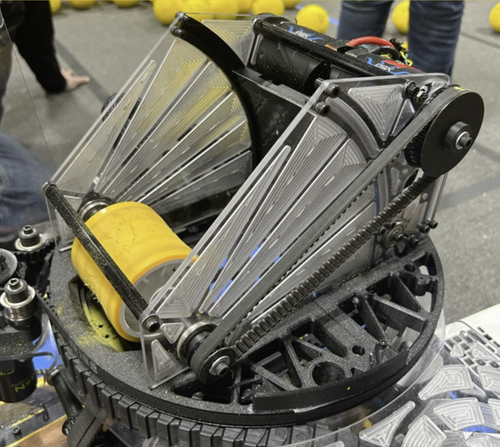
Turret
The turret is effectively what shoots the balls. The turret features a 3-inch flywheel paired with a garage door hood, allowing for precise and consistent aiming from all ranges of shots. The flywheel is powered by two Kraken X60 motors, providing the high torque and rapid acceleration needed for consistent shot velocity and accuracy. This ensures reliable performance even during quick, repeated shots. The turret also offers 375 degrees of rotation, giving us over a full circle of coverage and the flexibility to track targets from virtually any angle without needing to reposition the entire robot. Together, the powerful dual-motor flywheel and extended rotation range make the system both accurate and highly adaptable in dynamic gameplay situations.
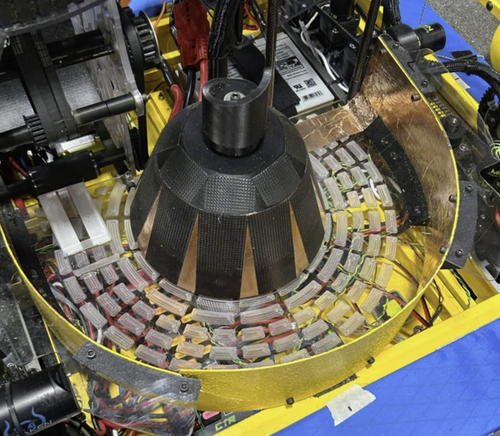
Spindexer
The Spindexer serves as our ball indexing system, efficiently managing game piece flow from intake to turret. It has a peak output of 10 balls per second, allowing for rapid scoring. The system is powered by a Kraken X60 motor paired with a VersaPlanetary gearbox. Both components are cleverly mounted inside the cone, maximizing space efficiency within the robot’s design.
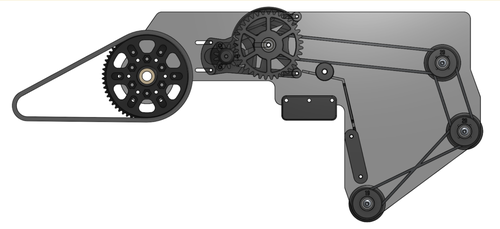
Intake
The intake is used to scoop balls off the floor, and it is a slap-down style mechanism powered by two CTRE Minion motors for quick deployment. The rollers are driven by two Kraken X44 motors, providing strong and consistent intake power. The dead-axled polycarbonate tubes are wrapped in silicone to improve grip while keeping the system lightweight and strong.
Software
For this year’s game, in terms of software, we use a few primary components along with basic code for robot movement and autonomous paths (the first 20 seconds of the match where the robot moves completely on its own).
First, we have Walleye. We’ve been using this system for the past few years and what it does is scans the various QR codes placed around the field. By doing this, the robot is “smart enough” to detect its location in relation to the field setup. This is useful when trying to plan out specific pathings for auton, or for the robot to “lock on” to certain places to shoot balls.
We also have implemented “automated logic.” These are functions that the programmers implemented into the robot to remove the added stress from the drive team. For example, some actions are completely automated. The drive team presses a button and the robot automatically employs a command to lock on to the hub (the shooting goal) and start shooting, or travel to certain spaces on the field to deploy passing.
We also have a “fuel finder” in development, which is essentially a ball tracker. The robot uses cameras to detect the balls on the field, so that it can intake it more efficiently, to reduce cycle times.
WE COMPETE SOON!
Our next competition is at Battle Creek Central High School on March 28 & 29, and we are so excited to both compete and show off our improved robot. Be sure to watch our social media updates about our match schedule and for the link to be able to watch the event livestream on Youtube!